Das serielle Kabel funktioniert.
Allerdings zunächst mal nur an meinem uralten Laptop mit RS232 Schnittstelle. Habe einen USB/RS232 Adapter bestellt. Dann können wir das an einen Raspi oder Desktop Rechner hängen.
zur Projektseite…
Neuer Lasercutter am JFZ
Am Mittwochabend war vorzeitig der Weihnachtsmann zu Besuch und hat uns ein besonderes Geschenk mitgebracht:
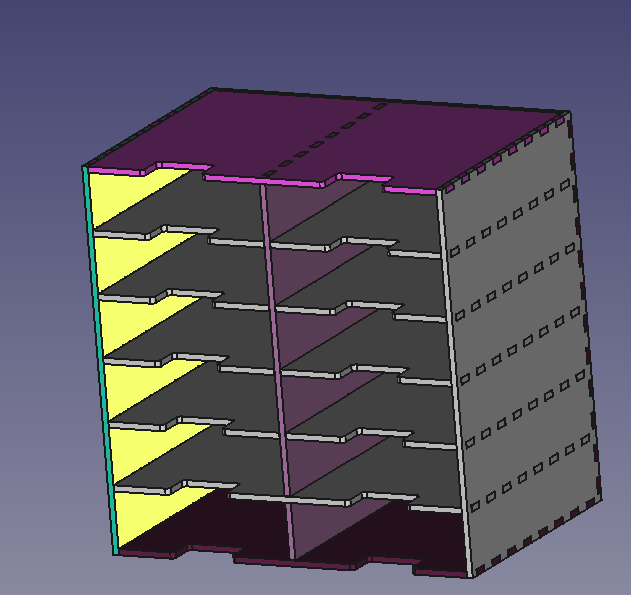
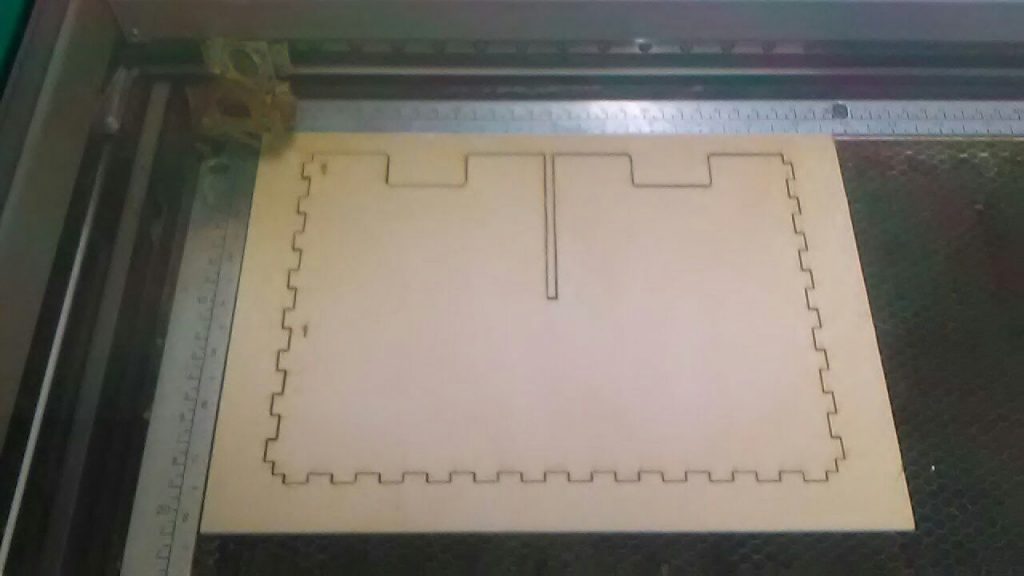
Die Firma https://tewipack.de/ hat uns einen Lasercutter vom Typ Epilog Helix 24 mit Absaugung und Kompressor geschenkt. Wir sind nun in der Lage Holzplatten und Acrylkunststoffe bis zu einer Größe 600x400mm zu gravieren und schneiden.
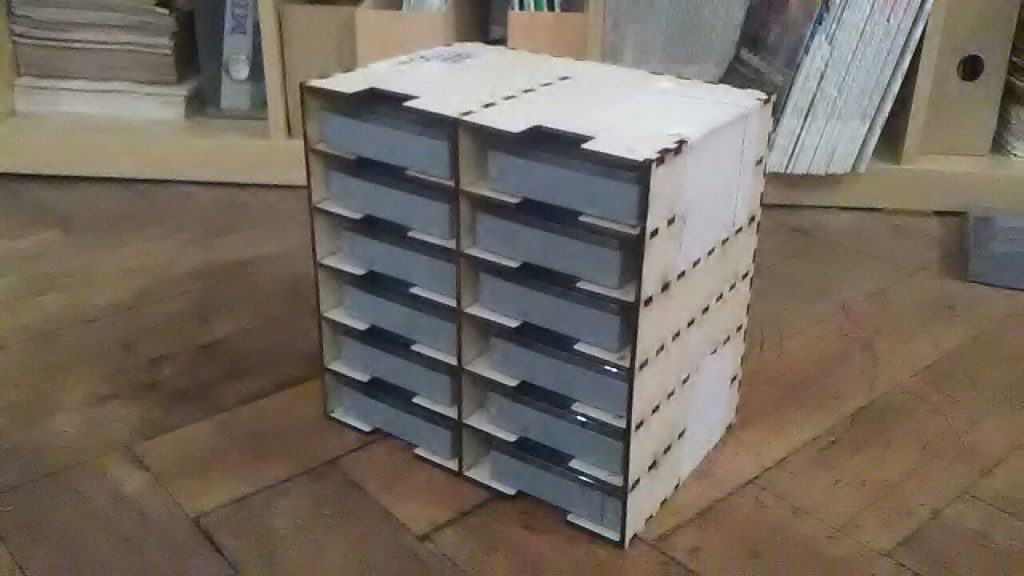
Die Schneideleistung müssen wir noch austesten, es sollten Materialstärken bis 10mm machbar sein. Gegenwärtig sind wir an der Einrichtung und Feinabstimmung. Der erste Schnittversuch war erfolgreich, ein Regal für die Elektro-Bauteile ist entstanden:
Sein Domizil hat der Laser im Elektrolabor, betreut wird er primär von [xsider], er unterstützt auch bei Konstruktion und Materialauswahl.
Vielen Dank an Herrr Uhl und seine Mitarbeiter für die Spende, die Einweisung in die Bedienung und die Anlieferung direkt in unser Labor.
Smart Tree House Lock – Projekt Update
Die Projektseite wurde etwas aktualisiert und einzelne Bereiche auch endlich mit Bildern versehen!
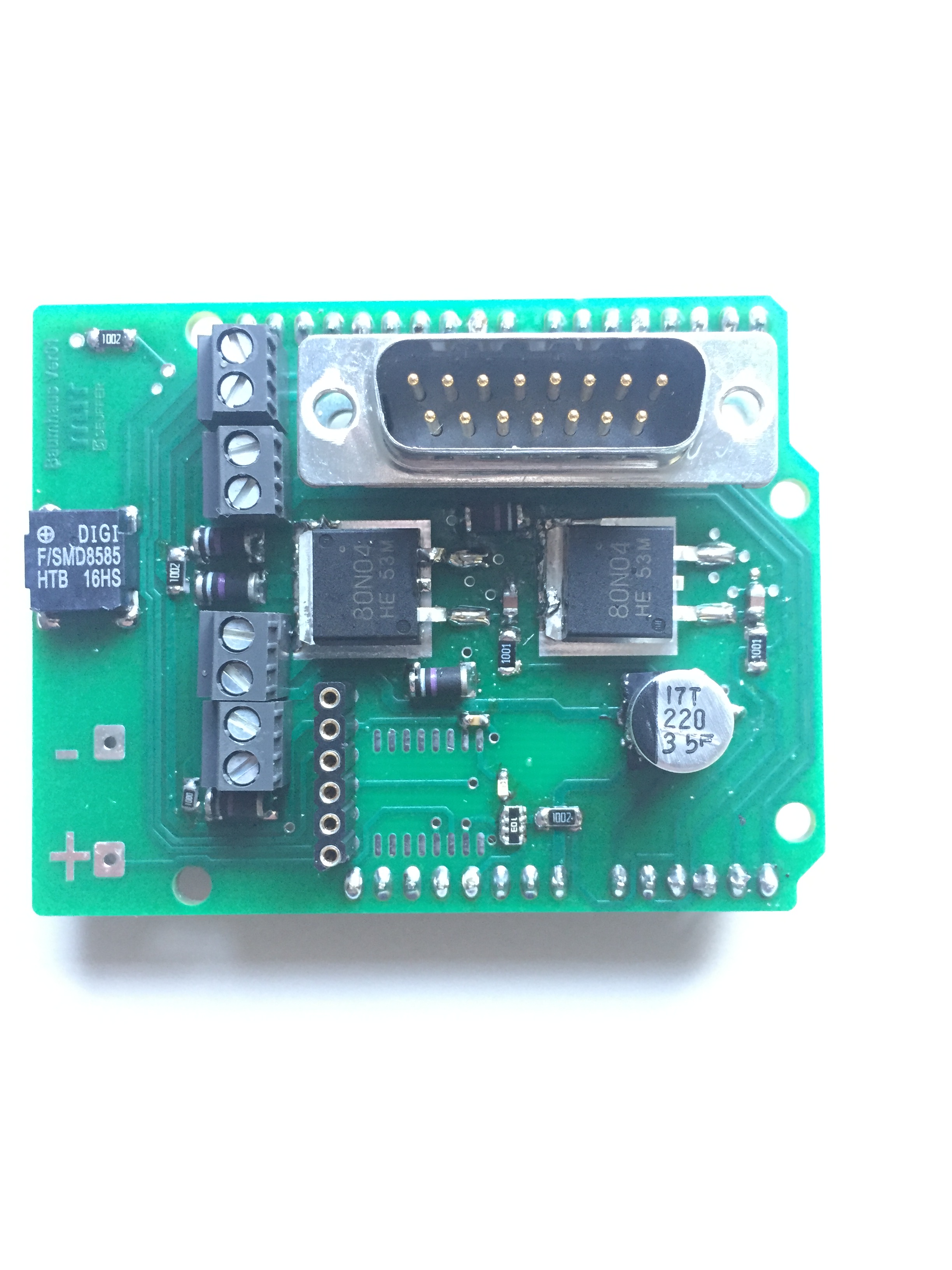
Beispielsweise die ersten Prototypen Versuche Anfang 2016, die später zu einer eigenen Platine entwickelt wurden:
COMING SOON:
– Gehäuse für den Arduino und Verkabelung (sind wir gerade dran!)
– Gehäuse für Tastatur und LCD Display (sind wir gerade dran!)
– Kommunikation zwischen Raspberry Pi und Arduino
– Besserer Türcode, der berechenbar aber nicht zu leicht erratbar ist {A, B, C, D, 0 – 9)
– Baumhaus Tagebuch im WLAN Bereich des Baumhauses! (Idee auf der GPN 2017 im Mai entstanden!)
Neues Projekt: C-Mix
Lilli, Cari, Iris und Ralf werden in den nächsten Monaten versuchen, die schon länger geplante Cocktail-Mix-Maschine zu verwirklichen.
Zunächst machen wir mal jede Menge Versuche mit Peristaltik-Pumpen
Später geht es dann um Arduino-Programmierung und einem User-Interface auf Raspi oder im Web-Browser.
Neues Projekt – HP Plotter

Wir haben zwei Plotter geschenkt bekommen, mit denen wir demnächst A0 und A1 Papier bedrucken können.
Davor muss aber noch einiges gebastelt werden. Daher habe ich zunächst mal den Inventaraufkleber „Limited“ draufgeklebt. Wenn alles käuft, ändere ich das in „Public“.
Neue (alte) Geräte
Aus privater Hand haben wir ein paar HP Instrumente gespendet bekommen.

In den 80ern absolut high end – heute aber auch noch ganz gut brauchbar.
C-Café fertig
Das C-Café kann jetzt genutzt zum Denken, Hacken oder Chillen werden.
Den Schlüssel gibt’s bei Susanne, Ralf, Martina, Andreas R und B oder Tim.

Flipdot Projekt abgeschlossen!!!

Endlich das Flipdot-Display ist am Start.
Ab jetzt gibt es hier alle möglichen Ankündigungen zu lesen.
Mehr zum Projekt:
Online Artikel in Make:
Projektdokumentation auf c-hack.de
Source Code
Makernight am 21.07.2017
Am 21.07.2017 veranstalten wir wieder eine Makernight zum Thema Ultraschall.
Weiter Infos und Anmeldung unter jfz-calw.de.
Coming Soon…

Wir haben uns heute mal am Cafe-Schild betätigt.